محققان شیوهای نوین ابداع کردهاند که به رباتها این امکان را میدهد تا با یادگیری چند نمونه از رفتارهای ظاهری انسان، یک وظیفهی جدید مانند گذاشت و برداشت را بیاموزند.
با سرازیر گشتن خیل عظیم سفارشات در تجارت الکترونیک، یک ربات انباردار، ماگ ها را از قفسهها برداشته و درون بسته بندی برای ارسال قرار میدهد. همه چیز به آرامی در حال پیش رفتن است تا زمانی که ربات انباردار با شرایط جدیدی روبرو میشود و به طور مثال، ربات باید لیوانهای بلندتر و باریک تری را جابجا کند.
برنامهریزی مجدد ربات، متشکل از برچسب گذاری دستی هزاران تصویر است که به ربات نشان میدهد چگونه لیوانهای جدید را در دست بگیرد و سپس سیستم دوباره آموزش میبیند. اما تکنیک جدیدی که توسط محققان MIT توسعه یافته است، تنها به چند نمونه نحوه حرکت انسان نیاز دارد تا ربات را مجدد برنامهریزی کند. این روش یادگیری ماشین، به ربات این امکان را میدهد تا اشیای جدیدی را که در وضعیتهای تصادفی دیده و هرگز با آنها برخورد نکرده است را جایگذاری کند. در این روش تنها بین ده تا پانزده دقیقه نیاز به زمان آموزش است و بعد از آن ربات قادر است تا یک عملیات جدید گذاشت و برداشت را انجام دهد.
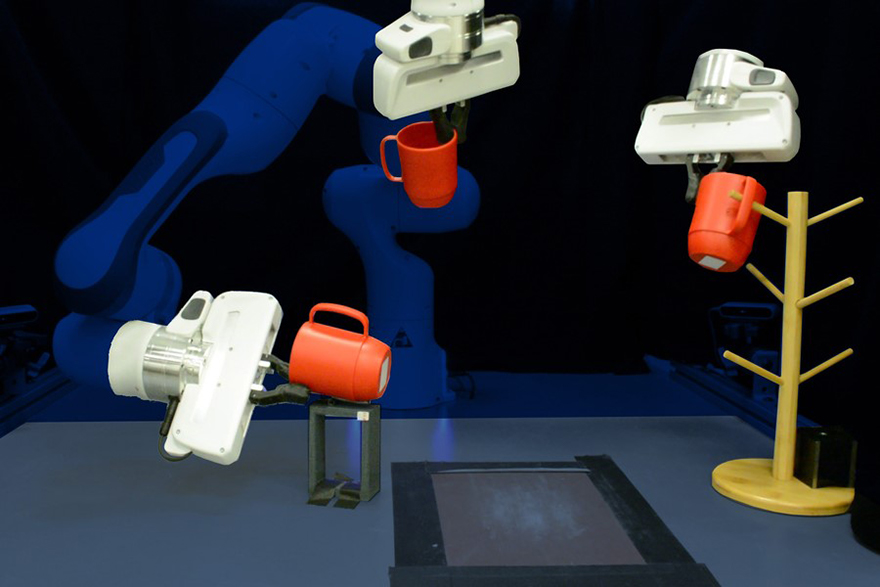
این تکنیک از یک شبکه عصبی برای بازسازی تصاویر اشکال سه بعدی استفاده میکند. تنها با استفاده از چند تصویر برداشتن جسم توسط انسان، این سیستم از آموختههای شبکه عصبی و هندسه سه بعدی استفاده میکند تا اشیا جدید را شبیه به نمونههای آزمایشی درک کند. در شبیه سازیها با استفاده از یک بازوی رباتیک این سیستم میتواند، به شکلی موثر، ماگ ، کاسه و بطری های از پیش دیده نشده و در وضعیتهای تصادفی را تنها با آموزش ده وضعیت ظاهری به سیستم جا به جا کند.
تمرکز اصلی این تکنیک برخورداری از یک مهارت جدید به شکلی موثر برای رباتهایی است که نیاز به کارکردن در محیطهای سازمان نیافته، فاقد ساختاربندی با متغییرهای زیاد دارند.
یک ربات ممکن است برای برداشتن یک جسم خاص آموزش دیده باشد اما اگر آن جسم به پهلو قرار گرفته باشد، برای مثال روی زمین افتاده باشد، در این صورت ربات با یک سناریوی جدید مواجه میشود. این یکی از دلایلی است که برای سیستم های یادگیری ماشین تعمیم دادن جهتگیریهای اشیا سخت میشود. برای فائق آمدن بر این مشکل، محققان مدل جدیدی از شبکه عصبی موسوم به NDF را ابداع کرده اند که هندسه سه بعدی دستهای از اشیا را میآموزد.
این تیم شبکه عصبی NDF را با ویژگی معادل سازی طراحی کردهاند. بر اساس ویژگی معادل سازی، اگر مدل عکس یک ماگ از بالا باشد و سپس عکس همان ماگ از کنار نشان داده شود، سیستم متوجه میشود که مدل همان ماگ نخست است و تنها چرخش داشته است.
همان طور که NDF یاد میگیرد اشکال اشیا مشابه را بازسازی کند، همچنین یاد میگیرد که بخشهای مرتبط آن اشیا را به هم مرتبط کند. برای مثال یاد میگیرد که دستههای لیوانها شبیه هم هستند، حتی اگر برخی از لیوانها بلندتر یا پهن تر از بقیه باشند و یا دستههای کوچکتر یا بلندتری داشته باشند. اگر بخواهید همین کار را با رویکرد دیگری انجام دهید، باید همهی قسمتها را با دست برچسب بزنید در عوض این رویکرد جدید به طور خودکار این بخشها را از بازسازی شکل کشف میکند.
در آینده توسعه این روش به کنارگذاشتن کامل مفهوم دستهبندی منجر خواهد شد. اینکه چقدر میتوانیم مهارتهای عملکردی جدید را به ربات آموزش دهیم، به توانایی تعمیم دهی ربات از چند نمونه نمایش ظاهری بستگی دارد. بدین معنا که چگونه یک ربات میتواند حالتهایی از برداشتن و جایگذاری را از یک شی به اشیایی که پیش تر ندیده است، منتقل کند.