
استپر موتور یا سروو موتور؟ کدامیک را انتخاب کنیم؟ کدام موتور مناسبتر است؟ آیا هر دو این موتورها یک کاربرد دارند و یک کار انجام میدهند؟ تفاوت استپر موتور و سروو موتور چیست؟
در بسیاری از صنایع و تجهیزاتی که در آنها دقت کنترل مکانی یا موقعیت برای ما از اهمیت بسیار زیادی برخوردار است از استپر موتور یا سروو موتور استفاده میکنیم. اما آیا میتوان در تمامی حالات و برای هر نوع کاربری که در آن دقت کنترل موقعیت اهمیت بسیار زیادی دارد، از هر کدام از این موتورها به دلخواه استفاده کرد؟
اگر نمیتوان در شرایط یکسان از هر دو این موتورها استفاده کرد، پس تفاوت استپر موتور و سروو موتور چیست؟
برای اینکه پاسخ این سوالات را بدانید و اطلاع جامعی در مورد سروو موتور و استپ موتور بدست بیاورید با ما همراه شوید.
از آنجایی که هر دو این موتورها به منظور کنترل موقعیت با دقت بسیار بالا طراحی و ساخته شده اند، ممکن است این سوال پیش بیاید که چه نوع موتوری برای پروژه مورد نظر مناسبتر است و بین دو گزینه استپ موتور و سروو موتور مردد هستید.
پس با توجه به این مورد، در این مقاله ابتدا هر کدام از این موتورها یعنی استپر موتور و سروو موتور را تعریف کرده، سپس به بیان ویژگیها، کاربردها، مزایا و معایب آنها میپردازیم و در نهایت تفاوت استپر موتور و سروو موتور را در در بخشهای مختلف و با توجه به انواع فاکتورها توضیح خواهیم داد تا کمکی به انتخاب بهتر و دقیقتر خریداران و استفاده کنندگان این نوع تجهیزات شود.

اما پیش از اینکه بخواهیم توضیحات مربوط به تفاوت استپر موتور و سروو موتور را بگوییم باید به این نکته توجه کرد که هر یک از این موتورها در کاربرهای گوناگون عملکرد بهتری نسبت به دیگری دارند و در نتیجه موتوری که قادر باشد تمامی نیازهای ما را به بهترین شکل برآورده کند وجود ندارد. در واقع این یک حقیقت مهندسی است که چیزی با عنوان راه حل کامل وجود ندارد و فقط بهترین راهحل برای یک مشکل وجود دارد.
با توجه به توضیحات داده شده نتیجه میگیریم که بهترین موتور با توجه با نوع کاربری و نوع نیاز مشخص میشود و بهترین موتور، موتوری است که بتواند بیشتر نیازهایمان را برطرف سازد.
این امر به ویژه در انتخاب بین موتورهای سروو و استپر موتورها صادق است. هر دو به طور گسترده در صنعت استفاده میشوند و هیچ یک راه حل قطعی و نهایی نیستند. با این حال، هنگامی که به درستی انتخاب شوند، هر دو این موتورها میتوانند قدرت موثر و قابل اعتمادی را برای یک سیستم فراهم کنند. تصمیم برای انتخاب بین این دو به عوامل زیادی وابسته است اما مهمترین آنها سرعت، شتاب و قیمت نهایی میباشند.
همانطور که گفته شد در این مقاله میخواهیم تفاوت استپر موتور و سروو موتور را که دو تا از مهمترین و پرکاربردترین الکتروموتورها محسوب میشوند را بگوییم و آنها را با هم مقایسه کنیم. اما پیش از آن باید اطلاعات خوبی در مورد هر یک از این موتورها داشته باشیم.
استپر موتور چیست؟
استپر موتور (Stepper Motor) یا موتور پلهای نوعی موتور الکتریکی است که به صورت مرحلهای حرکت میکند و عملکرد آن به گونهای است که به جای چرخش مداوم، با گامهای کوچک و معین حرکت میکند.
در حقیقت حرکت چرخشی در استپ موتور به مراحل یا پله های مجزا تقسیم شده است. این نوع موتور به طور عمده در سیستمهای کنترلی حلقه باز استفاده میشود که نیازی به فیدبک برای کنترل موقعیت ندارند. استپر موتور با تقسیم حرکت خود به گامهای مساوی کار کرده و از این طریق میتواند موقعیتهای دقیق را ایجاد کند.

استپر موتور یا موتور پلهای شامل یک روتور با آهنربای دایمی و یک استاتور ثابت است که سیم پیچ ها روی آن قرار گرفتهاند. جریانی که از سیمپیچهای استاتور عبور میکند، باعث ایجاد میدان مغناطیسی میشود که این میدان مغناطیسی با میدان مغناطیسی روتور تعامل نموده و نیروی چرخشی ایجاد و اعمال میکند.
موتورهای پلهای دارای تعداد قطبهای بالا هستند (معمولا 50 یا بیشتر) که هر قطب به ترتیب توسط درایور موتور انرژی میگیرد تا روتور در یک سری افزایشی به صورت پله بچرخد. اما به دلیل تعداد قطبهای بالا، حرکت بصورت پیوسته به نظر میرسد.
از جمله موارد دیگری که میتوان گفت این است که استپر موتور حرکت افزایشی ایجاد میکند و به طور کلی حلقه باز کنترل میشود و در نتیجه هزینه و پیچیدگی استفاده از سنسورها، فیدبک و کنترلهای خاص را کاهش میدهد. تعداد قطبهای بالا به این موتور این امکان را میدهد که گشتاورهای بالایی را در سرعت صفر تولید کند.
ضمن اینکه با توجه به تفاوت استپر موتور و سروو موتور که در ادامه به صورت کامل به آن خواهیم پرداخت، این موتور با توجه به برخی از کاربریها دارای پیچیدگی، امکانات و دقت کمتری نسبت به سروو موتور دارد. پس میتوان نتیجه گرفت که به طور کلی ارزانتر از سروو موتور باشد.
کاربردهای استپر موتور
تفاوت استپر موتور و سروو موتور باعث شده است در برخی کاربریها از استپ موتور بجای سروو موتور استفاده شود.
در واقع استپر موتور به علت سادگی و هزینه پایین در بسیاری از کاربردها مناسبتر است که در ادامه برخی از کاربردهای این نوع از الکتروموتور ذکر شدهاند.
- در چاپگرهای سهبعدی و به منظور حرکت دقیق محورها
- دستگاههای CNC کوچک و یا در ماشینآلات دستی برای ایجاد قطعات دقیق
- سیستمهای خودکار در خطوط تولید و مونتاژ که نیاز به حرکات دقیق دارند
- دستگاههای اندازهگیری و ابزارهایی که به دقت در اندازهگیری وابسته هستند
- صنعت رباتیک که شامل انواع رباتها یا تجهیزاتی که نیاز به کنترل موقعیت دقیق دارند
مزایای استپر موتور
هر یک از این موتورها نسبت به دیگری مزایایی دارند که این مزایا مسلما به دلیل تفاوت استپر موتور و سروو موتور است. مزایای استپر موتور شامل موارد زیر است.
- قیمت پایین و مقرون بصرفه
- سادگی در کنترل
- دقت مناسب
معایب استپر موتور
تفاوت استپر موتور و سروو موتور همانطور که باعث ایجاد مزیت هایی برای استپ موتور شده است، معایبی را برای این موتور شامل شده است که در ادامه میتوان این معایب را ملاحظه کرد.
- کاهش گشتاور در سرعت بالا
- تولید حرارت حین انجام کار و احتمال اشکال در عملکرد
- امکان ایجاد محدودیت در حرکت به دلیل روش کار مرحلهای
سروو موتور چیست؟
سروو موتور یک نوع موتور الکتریکی است که برای کنترل دقیق موقعیت، سرعت و شتاب برای کاربردهای بسیار دقیق با دینامیک بالا طراحی شده است. این موتورها معمولا به سیستمهای کنترلی بسته متصل میشوند که شامل سنسورها و کنترلرهایی بوده که اطلاعات لازم برای تنظیم عملکرد موتور را فراهم میکنند.
سیستمهای سروو به طور معمول از یک موتور DC یا موتور AC و یک گیربکس، سنسور موقعیت و یک کنترلر تشکیل شدهاند. زمانی که سیگنال معینی به کنترلر میرسد، کنترلر موتور را به گونهای تنظیم میکند که به موقعیت مورد نظر برسد.
یک سروو موتور از یک روتور با آهنرباهای دایمی و یک استاتور ثابت با سیم پیچ تشکیل شده است. درست مانند استپ موتور، استاتور یک جریان میدان مغناطیسی ایجاد میکند که روی روتور برای ایجاد گشتاور عمل میکند. اما در سروو موتور به طور قابل توجهی قطبهای کمتری نسبت به استپر موتور وجود دارد. در نتیجه، آنها عموما باید تحت کنترل حلقه بسته اجرا شوند.
به طور کلی، سرعت سروو موتورها در حدود چند هزار دور در دقیقه است و به طور قابل توجهی سریعتر از استپ موتورها کار میکنند. این ویژگی به سروو موتور اجازه میدهد تا به همراه گیربکسها برای ارایه گشتاور بسیار بالاتر در سرعتهای مورد نیاز و مشخص استفاده شود. ضمن اینکه سروو موتور گشتاور پایدارتری را به نسبت استپر موتور در بازه سرعتی موتور ارایه میدهد که این یک مورد از تفاوت استپر موتور و سروو موتور میباشد.

البته تفاوت استپر موتور و سروو موتور چندین مورد را شامل میشود. به عنوان مثال سروو موتور برخلاف استپر موتور، گشتاور نگهدارنده ندارند. با این حال، عملیات کنترل حلقه بسته به کنترلر یا سروو درایو این امکان را میدهد تا کنترلر بار را در یک موقعیت خاص نگه دارد و موتور تغییرات مداوم را برای نگه داشتن بار انجام دهد.
در سروو موتور معمولا از آهنرباهای خاص استفاده شده در حالی که در استپر موتور اغلب از آهنرباهای معمولی ارزان قیمت استفاده میشود. آهنرباهای خاص سروو موتور را قادر میسازند تا گشتاور بیشتری را در ابعاد کوچکتر ایجاد کنند.
سروو موتور نسبت به استپ موتور یا موتور پلهای دارای سرعت و گشتاور بهتری بوده و همچنین مقادیر بالاتری از شتاب را تولید کند. ضمن اینکه این نوع موتور الکتریکی به لطف کنترل حلقه بسته، موقعیتیابی دقیقتری را ارایه میدهد.
کاربردهای سروو موتور
همانطور که گفتیم تفاوت استپر موتور و سروو موتور باعث ایجاد کاربریها متفاوتی برای این دو موتور شده است. سروو موتورها به دلیل دقت بسیار بالا و قابلیت کنترل در شرایط پیچیده در بسیاری از صنایع و تجهیزات مدرن استفاده میشوند که شامل موارد زیر میباشد.
- سیستم های CNC که نیاز به دقت بسیار بالا به منظور تولید قطعات و ماشین کاری دارند
- دستگاه هایی که توانایی برش و فرم دهی بسیار دقیق دارند
- صنعت رباتیک که نیاز به کنترل بسیار دقیق تمامی حرکات موقعیت یابی رباتها در آن وجود دارد
- تجهیزات پزشکی که نیاز به حرکت دقیق و تعیین موقعیت دارند
- ماشین های چاپ که نیازمند دقت بسیار بالا هستند

البته این موارد تنها بخشی از کاربردهای سروو موتور است. در داقع هر چه با کاربردهایی مواجه میشویم که دقت موقعیت یابی و دقت در تعیین سرعت در آنها بیشتر است، نیاز به سروو موتور نیز بیشتر خواهد بود.
مزایای سروو موتور
تفاوت استپر موتور و سروو موتور باعث ایجاد مزایا و معایبی برای هر یک از این موتورها شده است. در مورد سروو موتور میتوان گفت که مزایای زیادی دارد که باعث استفاده از این نوع موتور در صنعت شده است که در ادامه مهمترین آنها را ذکر میکنیم
- دقت بسیار بالا در کنترلرهای حلقه بسته
- پاسخ سریع به تغییرات و همچنین سیگنالهای کنترلی
- قابلیت تغییر جهت سریع
- ایجاد گشتاور بسیار بالا نسبت به سرعت
- توان خروجی بسیار بالا نسبت به حجم موتور
- راندمان بسیار بالا نسبت به حجم موتور
- داشتن صدای کم در هنگام کار و فعالیت
معایب سروو موتور
مزایای زیاد سروو موتور باعث نشده که معایبی نداشته باشد. در واقع تفاوت استپر موتور و سروو موتور باعث این شده که سروو موتور نیز در برخی کاربری ها و شرایط به خوبی استپ موتور نباشد. در ادامه معایب سروو موتور ذکر شده است.
- هزینه خرید، نصب و تعمیر بالاتر نسبت به استپ موتور
- پیچیدگی در نصب و نیاز به سیستمهای کنترلی پیچیده برای استفاده بهینه از قابلیتهای این موتور
- حساسیت بالا نسبت به خطا و بروز اشکال در صورت عدم کالیبراسیون درست
تفاوت استپر موتور و سروو موتور در چیست؟
پس از اینکه هر یک از این موتورها را توضیح دایم و کاربردها، مزایا و معایبشان را گفتیم. نوبت به پاسخ پرسش تفاوت استپر موتور و سروو موتور چیست میرسد که در ابتدای مقاله مطرح کردیم و حال باید به آن پاسخ دهیم.
اگر میخواهید بدانید تفاوت استپر موتور و سروو موتور چیست؟ باید مقایسه ای جامع در مورد این دو موتور داشته باشیم
پس با مقایسه دقیق این دو نوع موتور، نشان خواهیم داد که هر یک از آنها در برخی المان ها عملکرد بهتری دارد.
۱ – تفاوت ساختاری
شاید اولین تفاوت استپر موتور و سروو موتور، تفاوت ساختاری این دو موتور است. استپر موتور به طور عمده از سیم پیچ ساخته شده و دارای یک روتور پلهای است. این پلهها دارای خاصیت مغناطیسی هستند و با توجه به زاویهای که دارند، میتوانند موقعیت مکانی را تنظیم کنند.
البته باید به این نکته اشاره کرد که همین ساختار را میتوان در سروو موتور هم مشاهده کرد، اما تفاوت استپر موتور و سروو موتور در این است که تعداد قطبهای مغناطیسی در سروو موتور از استپ موتور بیشتر است.
برای راهاندازی هردوی این موتورها نیاز به یک درایو وجود دارد که میتواند با ایجاد پالس، حرکت دستگاه را ممکن کند. اما نکته مهم اینجا است که سروو موتور، علاوه بر درایو، به یک فیدبک هم نیاز دارد؛ به همین دلیل است که فضای بیشتری را اشغال میکند و نیاز به محیط بزرگتری برای نصب دارد.
۲ – تفاوت در دقت اندازه گیری
دیگر تفاوت استپر موتور و سروو موتور تفاوت در دقت این دو موتور است. درست است که استپ موتور و موتور سروو هر دو بسیار دقیق هستند اما میزان دقت آنها یکسان نیست.
پس اگر بخواهیم توضیح بیشتری در مورد تفاوت استپر موتور و سروو موتور به لحاظ دقت داشته باشیم و آنها را بدین جهت با هم مقایسه کنیم، باید گفت که دقت سروو موتور نسبت به استپ موتور بیشتر است. چرا که در استپ موتور شما هیچ ابزاری در اختیار ندارید که به شما اطمینان دهد موتور در هر پله یا گام، دقیقا به اندازه مورد نظر حرکت کرده است یا خیر.
این در حالی است که فیدبک موجود در سروو موتور، بر اساس موقعیت موتور، یک سیگنال برای درایو ارسال میکند. حالا الگوریتمهای درایو به طوری پیاده سازی میشوند که موتور دقیقا در موقعیت مکانی تعریف شده باقی بماند و جابجا نشود.
۳ – تفاوت در کنترل مقدار سرعت
دیگر تفاوت استپر موتور و سروو موتور تفاوت در مقدار سرعت تولید شده توسط هر یک از این موتورها است.
در مواردی که نیاز به ایجاد سرعت زیاد است، سروو موتور بهترین گزینه به شمار میرود. زیرا این دستگاه قادر است به صورت معمول سرعتی در بازه ۰ تا ۶۰۰۰ دور در دقیقه و حتی در برخی موارد تا سرعتهای بالاتر را ایجاد کند. از طرف دیگر استپ موتورها تنها قادر به تولید سرعت تا ۵۰۰ دور بر دقیقه هستند.
۴ – تفاوت در کنترل مقدار گشتاور
همانطور که گفته شد سروو موتور از یک سنسور فیدبک مانند انکودر یا ریزالور برای اندازهگیری دقیق موقعیت و سرعت خود استفاده میکنند. با توجه به این ویژگی، سروو موتورها میتوانند در شرایط مختلف، گشتاور خروجی خود را بهینه کرده و حتی در سرعتهای پایین، گشتاور بالایی ارایه دهند که همین مورد یک تفاوت استپر موتور و سروو موتور محسوب میشود.
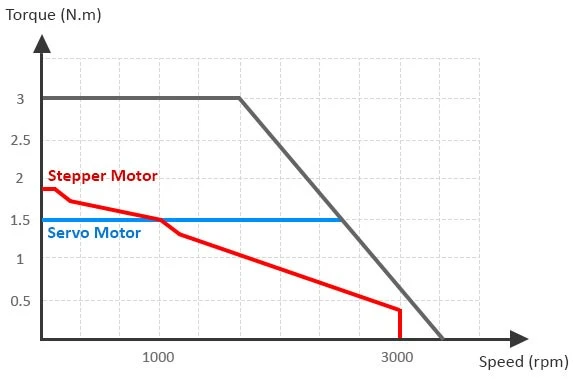
یکی از مزیتهای اصلی سروو موتور این است که میتوانند در دامنه وسیعی از سرعتها، گشتاور ثابت تولید کند. این ویژگی باعث میشود که سروو موتور برای کاربردهایی که نیاز به کنترل دقیق گشتاور و سرعت دارند، مناسب باشد.
از طرف دیگر استپر موتورها معمولا دارای گشتاور اولیه بالایی هستند، اما با افزایش سرعت، گشتاور آنها به شدت کاهش مییابد.
برخلاف سروو موتورها، استپر موتورها معمولا فاقد سیستم بازخورد برای تنظیم گشتاور هستند. حرکت این موتور بر اساس تعداد پالسهای ارسالشده است، اما نمیتواند بهطور خودکار مقدار جریان ورودی را تنظیم کند تا گشتاور بیشتری تولید شود.
به منظور درک هر چه بهتر توضیحاتی که برای تفاوت استپر موتور و سروو موتور به لحاظ گشتاور داده شد و مقایسه آنها میتوان شکل زیر که نمودار تغییرات گشتاور استپ موتور و سروو موتور را با توجه به تغییرات سرعت هر یک از آنها مشاهده کرد را در نظر گرفت.
۵ – تفاوت در منبع تغذیه
تفاوت استپر موتور و سروو موتور به لحاظ منبع تغذیه مورد استفاده را هم میتوان به عنوان یک تفاوت مهم در این موتورها در نظر گرفت. در واقع استپر موتور و سروو موتور میتوانند با استفاده از منبع تغذیه مستقیم یا DC کار کنند. اما اگر میخواهید موتور مورد نظر با منبع تغذیه متناوب یا AC نیز سازگار باشد، در این صورت تنها سروو موتور به کار شما میآید.
به بیان دیگر تنها سروو موتور قادر است از منبع تغذیه متناوب یا DC استفاده کند ولی استپر موتورها چنین قابلیتی ندارند. البته باید این نکته نیز در نظر گرفته شود که مورد استفاده سروو موتورهای AC اغلب در توانهای پایین است و بر خلاف سروو موتورهای DC نیازی به تعمیر و نگهداری مداوم ندارند.
۶ – تفاوت در قیمت و هزینه
در اینجا میرسیم به آخرین تفاوت استپر موتور و سروو موتور که در واقع تفاوت در قیمتهای این دو موتور است. همانطور که گفته شد سروو موتور بواسطه داشتن مدهای کنترلی دارای سرعت و دقت بیشتر و همچنین توانایی در تنظیم عملکرد است که این قابلیتها تا حدودی باعث افزایش قیمت و هزینه به نسبت استپ موتور میشود.
پس در زمان انتخاب و خرید موتور توجه داشته باشید که موتوری را انتخاب کنید که متناسب با کار شما باشد.
با اینکه سروو موتورها مزایای زیاد و غیر قابل انکاری دارند. با این حال، از نظر تکرار پذیری، استپ موتورها بسیار مناسب هستند.
همانطور که گفتیم فاکتور قیمت یک تفاوت استپر موتور و سروو موتور است و در شرایط و کاربریهایی که این پارامتر مطرح میشود، استپ موتورها معمولا نیازی به فیدبک یا سیستم کنترل بازخورد ندارند. از آهنربای ارزانتر استفاه میکنند و به ندرت دارای گیربکس هستند. این نوع موتورها دارای تعداد قطبهای زیاد و توانایی تولید گشتاور نگهدارنده بوده و در سرعت صفر انرژی کمتری مصرف میکنند.
با توجه با توضیحات داده شده، استپ موتورها میتوانند تا حدودی ارزانتر از سروو موتورهای مشابه باشند. بنابراین هنگامی که پروژهای دارید که بودجه آن مناسب نیست، انتخاب این موتور مقرون بصرفهتر است. اما اگر عملکرد و کارایی را ملاک قرار دهیم، سروو موتورها گزینه بهتری هستند.
سخن پایانی
در بسیاری از صنایع و تجهیزاتی که در آنها دقت کنترل موقعیت از اهمیت بسیار زیادی برخوردار است، میبایست از موتورهایی استفاده شود که قادرند این نیاز را به بهترین شکل انجام دهند و برای همین از استپر موتور و یا سروو موتور استفاده میکنیم.
اما با توجه به شرایط خاص هر پروژه و همچنین تفاوت استپر موتور و سروو موتور در انواع کاربریهای مختلف، نتیجه میگیریم که با توجه به شرایط و نوع پروژه از کدامیک از این موتورها استفاده کنیم.
با توجه به موارد عنوان شده و همچنین اهمیت بالای انتخاب بین این موتورها بر آن شدیم تا مقالهای با عنوان تفاوت استپر موتور و سروو موتور ارایه کنیم که در آن به تحلیل دقیق و کاملی از تفاوتهای این موتوتورها و مقایسه آنها بپردازیم.
سوالات متداول
-
استپر موتور بهتر است یا سروو موتور؟
در یک کلام، بستگی به کاربرد دارد. اگر دقت بالا در سرعتهای کم با هزینه کم نیاز دارید، استپر موتور مناسب است. اما اگر سرعت و دقت بالا در شرایط دینامیک مهم است، سروو موتور انتخاب بهتری است.
-
آیا استپر موتورها ارتعاش دارند؟
بله، به دلیل حرکت پلهای ممکن است در برخی سرعتها ارتعاش ایجاد کنند که با استفاده از میکرواستپینگ کاهش مییابد.
-
چرا سروو موتورها نسبت به استپر موتورها گرانتر هستند؟
به دلیل وجود سیستم فیدبک (انکودر یا ریزالور) و درایورهای پیچیده، هزینه ساخت و نگهداری آنها نسبت به استپر موتورها بیشتر است.
-
آیا میتوان سروو موتور را جایگزین استپر موتور کرد؟
بله، اما به دلیل هزینه بالاتر، فقط در کاربردهای خاص مقرونبهصرفه است.
-
کدام موتور گشتاور بهتری دارد؟
استپر موتور در سرعتهای پایین گشتاور بالاتری دارد، اما سروو موتور در محدوده وسیعتری گشتاور ثابت ارایه میدهد.
-
آیا استپر موتورها نیاز به انکودر دارند؟
خیر، چون سیستم کنترل آنها اپنلوپ (حلقه باز) است. اما برخی مدلهای پیشرفته ممکن است انکودر داشته باشند.
-
کدام موتور برای CNC بهتر است؟
برای CNC های کوچک و ارزان، استپر موتور کافی است. اما برای ماشینآلات صنعتی با دقت بالا، سروو موتور مناسبتر است.